六自由度平台控制,六自由度平台数学建模,六自由度运动平台模型
六自由度平台控制,六自由度平台数学建模,六自由度运动平台模型
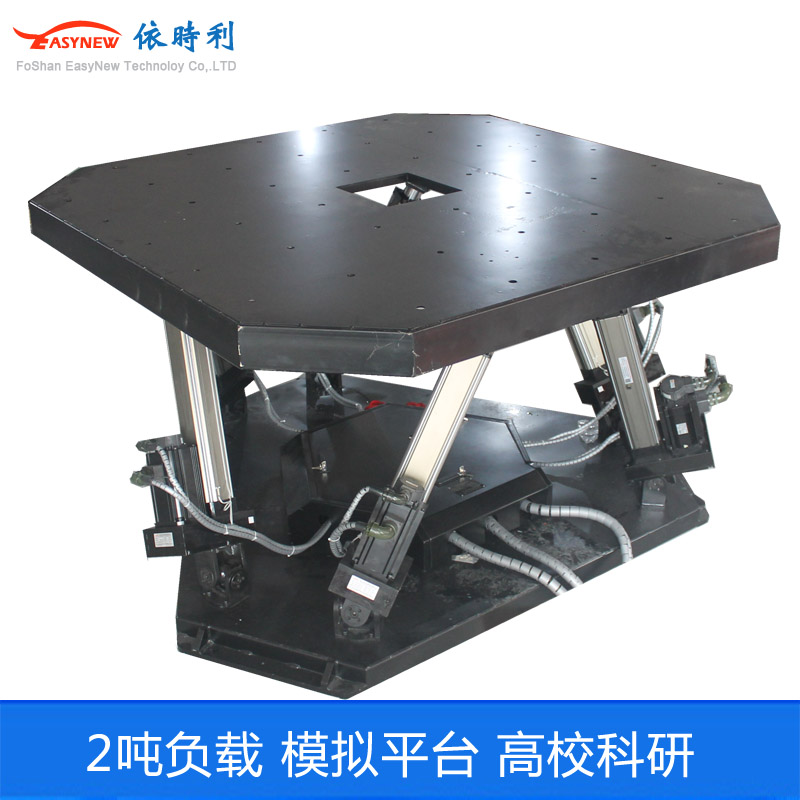
六自由度运动平台能在空间六个自由度上做任一自由度的单自由度运动,也能做任意几个自由度的复合运动。由于采用全数字控制的伺服系统及伺服电动缸作为平台运动部分的执行机构,因此,六自由度仿真平台的运动轨迹及速度平滑连续,既可实现高频响的快速运动,也可实现低速下的平稳运动。
六自由度动感平台主要性能
有效载荷1000kg
总载荷:1180kg(含上平台及铰链)
1.2运动能力指标
| 自由度 | 位移或角度 | 速度 | 加速度 |
| 纵向位移 | ±300mm | ±333mm/s | 0.66m/S² |
| 横向位移 | ±300mm | ±333mm/s | 0.66m/S²g |
| 垂直升降 | ±400mm | ±333mm/s | 0.66m/S² |
| 俯仰 | ±20° | ±16°/s | ±150°/s2 |
| 滚转 | ±20° | ±16°/s | ±150°/s2 |
| 偏航 | ±22° | ±16°/s | ±150°/s2 |
1.3系统功率需求
动感平台功率需求:2000W*6(单相220V)。
动感平台所有机械组件的设计载荷大于额定载荷的4倍。
1、运行环境温度: 0~40°C
2、储存温度: -20~70°C
3、湿度: 5~95%
4、防潮等级: 平台:IP64 控制箱:IP20
1、动感平台一次连续工作时间不低于48小时。
2、使用寿命不小于10000小时。
3、平均无故障时间MTBF≥2000小时。
4、机械故障平均维修时间MTTR≤1小时。
5、电气故障平均维修时间MTTR≤0.5小时。
1、电压220V,波动范围:-10%~+10%;
2、频率50HZ,波动范围:-5%~+5%;
3、容量:1.1KVA。
六、系统设备组成
| 序号 | 名 称 | 型 号 | 数量 |
| 1 | 电动缸 | YSL93-L,直线式 | 6套 |
| 2 | 伺服电机 | 2000W(有刹车)东菱 | 6套 |
| 3 | 电机驱动器 | 东菱 | 6台 |
| 4 | 上平台含铰链 | 非标产品 | 1个 |
| 5 | 下平台底座含铰链 | 非标产品 | 1套 |
| 6 | 电源和信号电缆 | 缆长6m | 6套 |
| 7 | 控制箱 | 1套 |
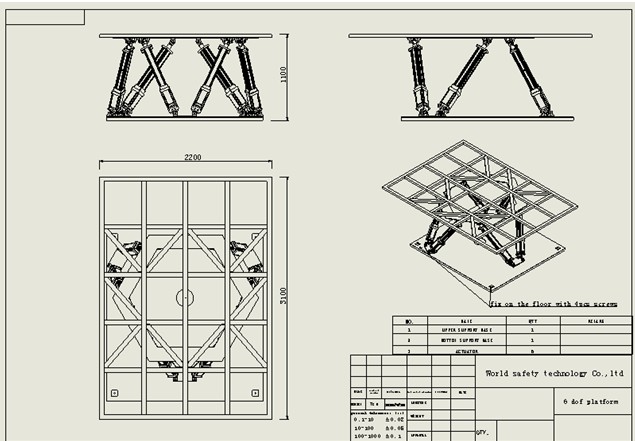
平台固定基座的占地尺寸为2000mm×2200mm,上平台尺寸为3100mmx2200mm。平台安装面距地面最低约1100mm.
运动安全范围4000mm X 3000mm.
A-01
平台外形图
电动缸参数表
| 型号 | YSL93-L | 备注 |
| 类型 | 直线式 | |
| 外形图号 | A-01 | |
| 行程 (mm) | 400 | |
| 丝杆导程(mm) | 10 | |
| 额定输出力 (KN) | 5.4 | |
| 最大出力(KN) | 16.2 | |
| 额定速度 (mm/sec) | 333 | |
| 最高速度 (mm/sec) | 500 | |
| 电机功率 (W) | 2000 | 东菱,有刹车 |
| 电机额定转速 (rpm) | 2000 | |
| 电机最高转速 (rpm) | 3000 | |
| 减速比 | 1:1 | |
| 限位开关 | 有 | 二个,NPN,常开 |
| 安装方式 | 铰链 | 参照外形图 |